Join to our channels: new products, coupons, best deals:
Flight controllers
Matek F405-miniTE
Multirotors → FPV Racing drones → Flight controllers → F4 FCs → Matek F405-miniTERecommended stores↓ Another stores

| MCU: | F405 |
| Gyro: | ICM42605 |
| Barometer: | Goertek SPL06-001 (I2C) |
| OSD: | AT7456E |
| CAM in: | + |
| Power : | 2-6S |
| 3.3V BEC: | + |
| 5V BEC: | 1.7A |
| 9V/10V BEC: | 1.4A |
| Current Sensor: | - |
| PWM: | 12 |
| ESC type: | - |
| ESC: | - |
| BLHeli: | - |
| Receiver: | - |
| VTX: | - |
| UART Rx: | 6 |
| UART Tx: | 6 |
| I2C: | + |
| Buzzer pad: | + |
| LED pad: | + |
| Vbat: | + |
| CURR pad: | + |
| Blackbox: | 16Mb |
| USB: | Type C |
| DJI compatible: | + |
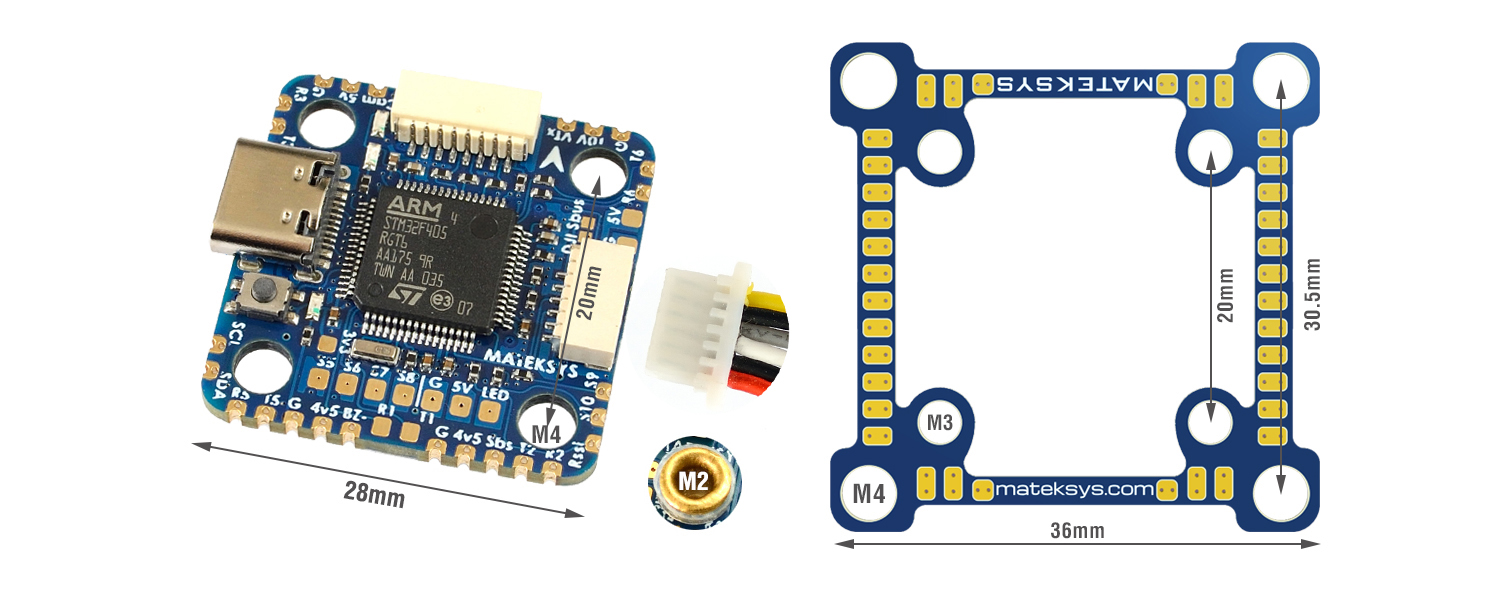
| Size: | 28 x 28 mmmm |
| Mount Holes: | 20x20 / 30.5x30.5mm |
| Weight: | 5g |
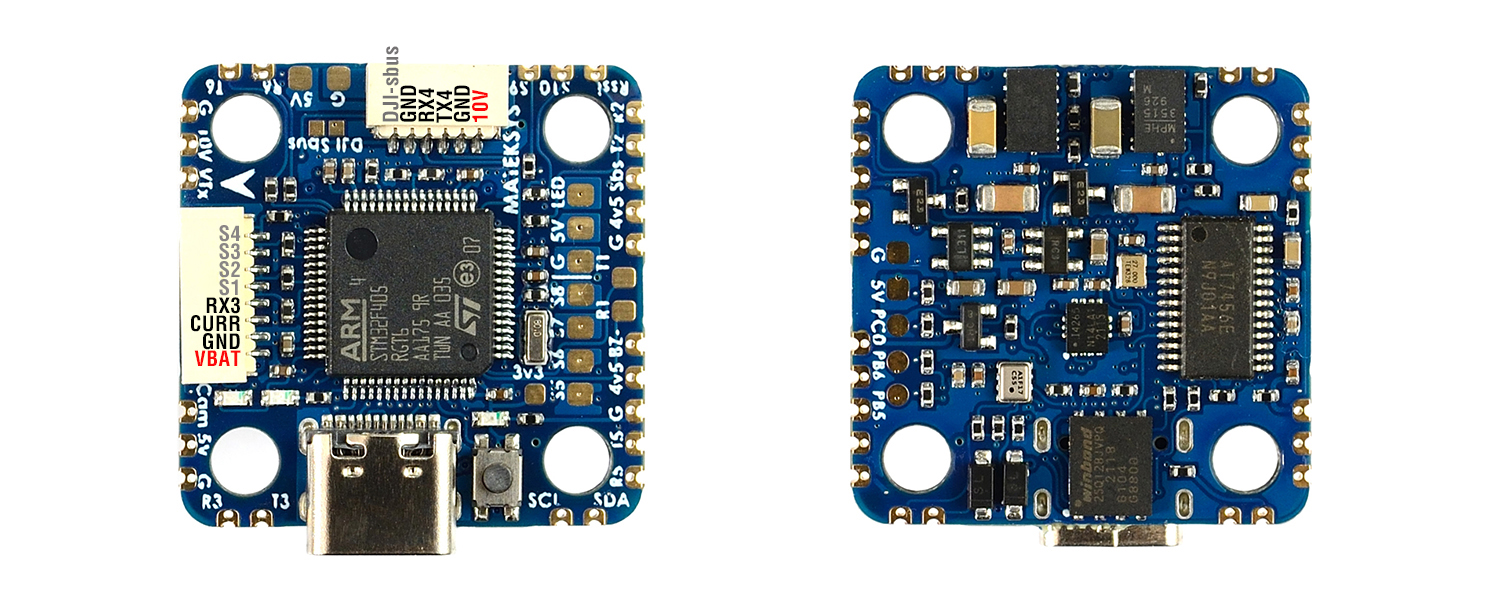
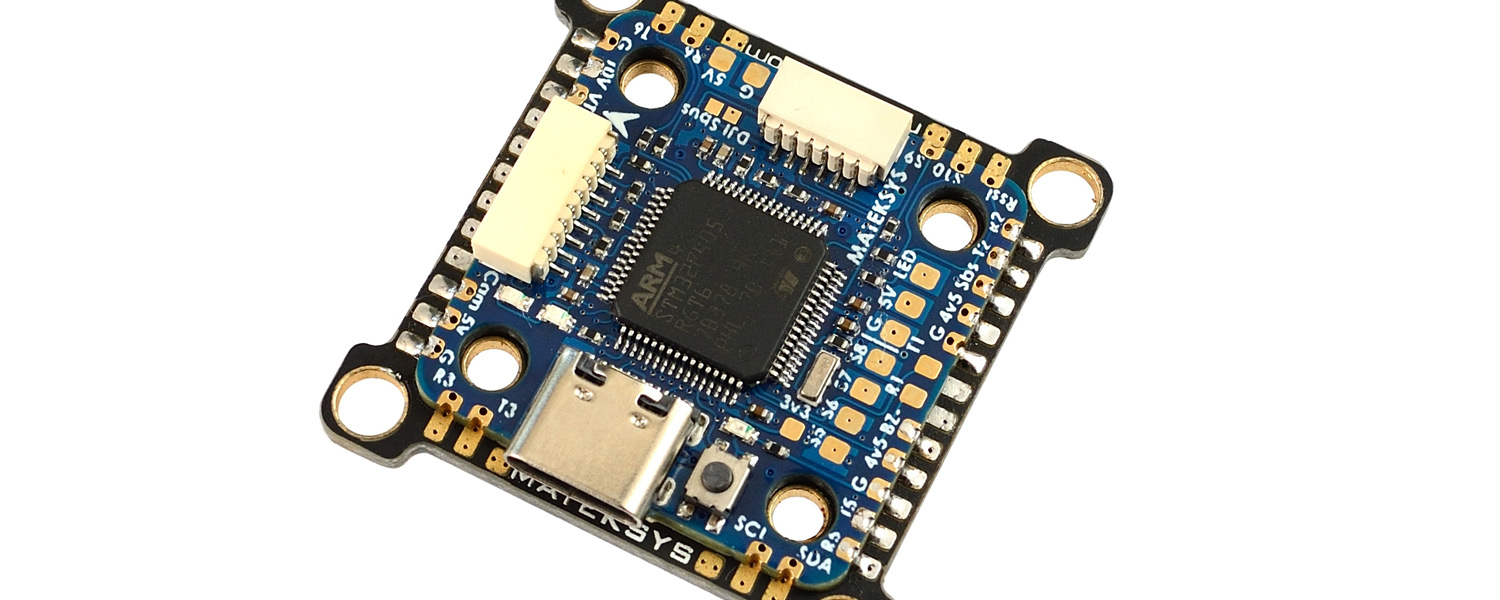
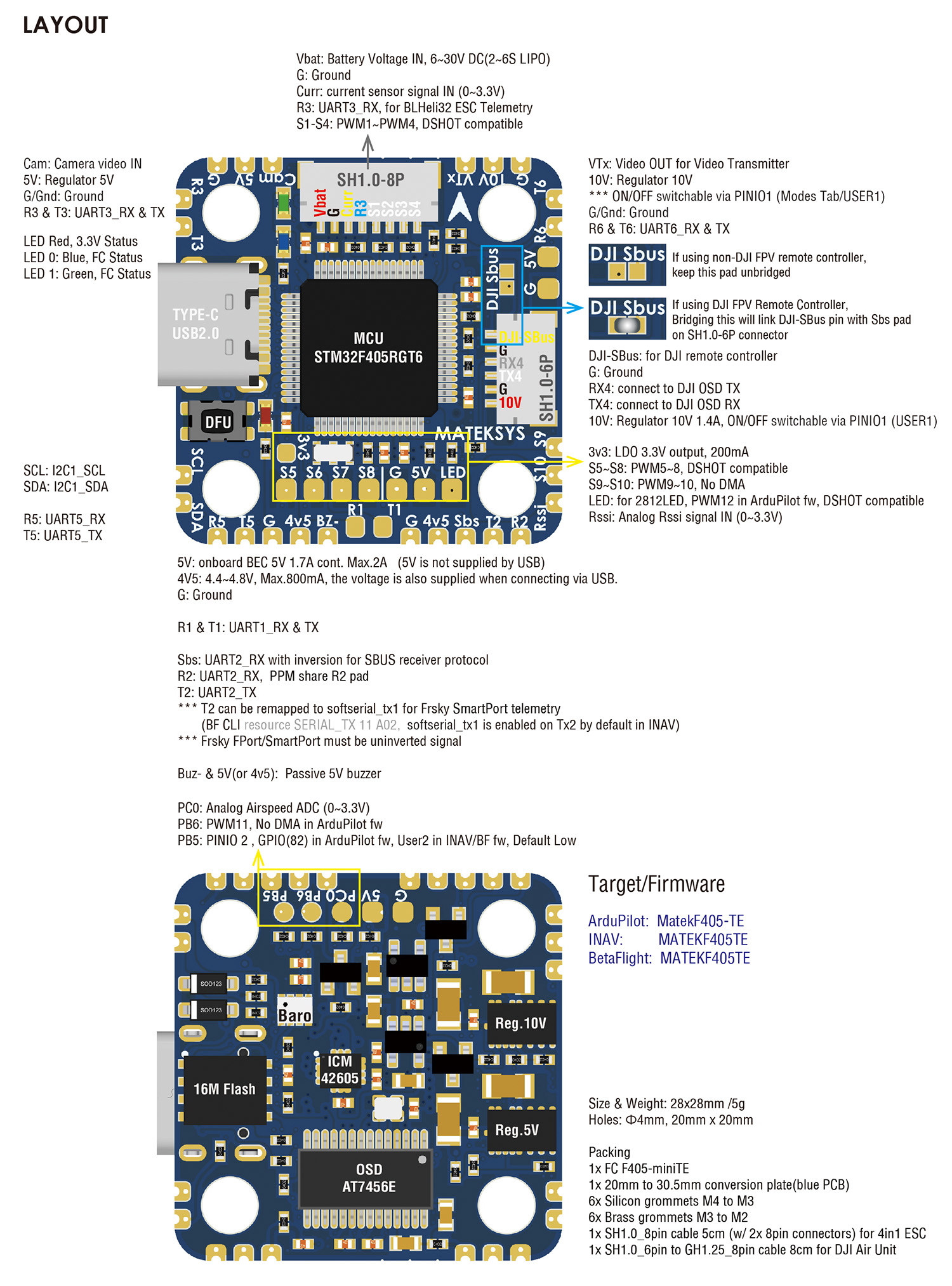
Flight Controller F405-miniTE
STM32F405RGT6, ICM42605, SPL06, OSD, 6x UARTs, 1x I2C, 12x PWM outputs, BEC 5V & 10V.

Gallery
Specifications
Layout
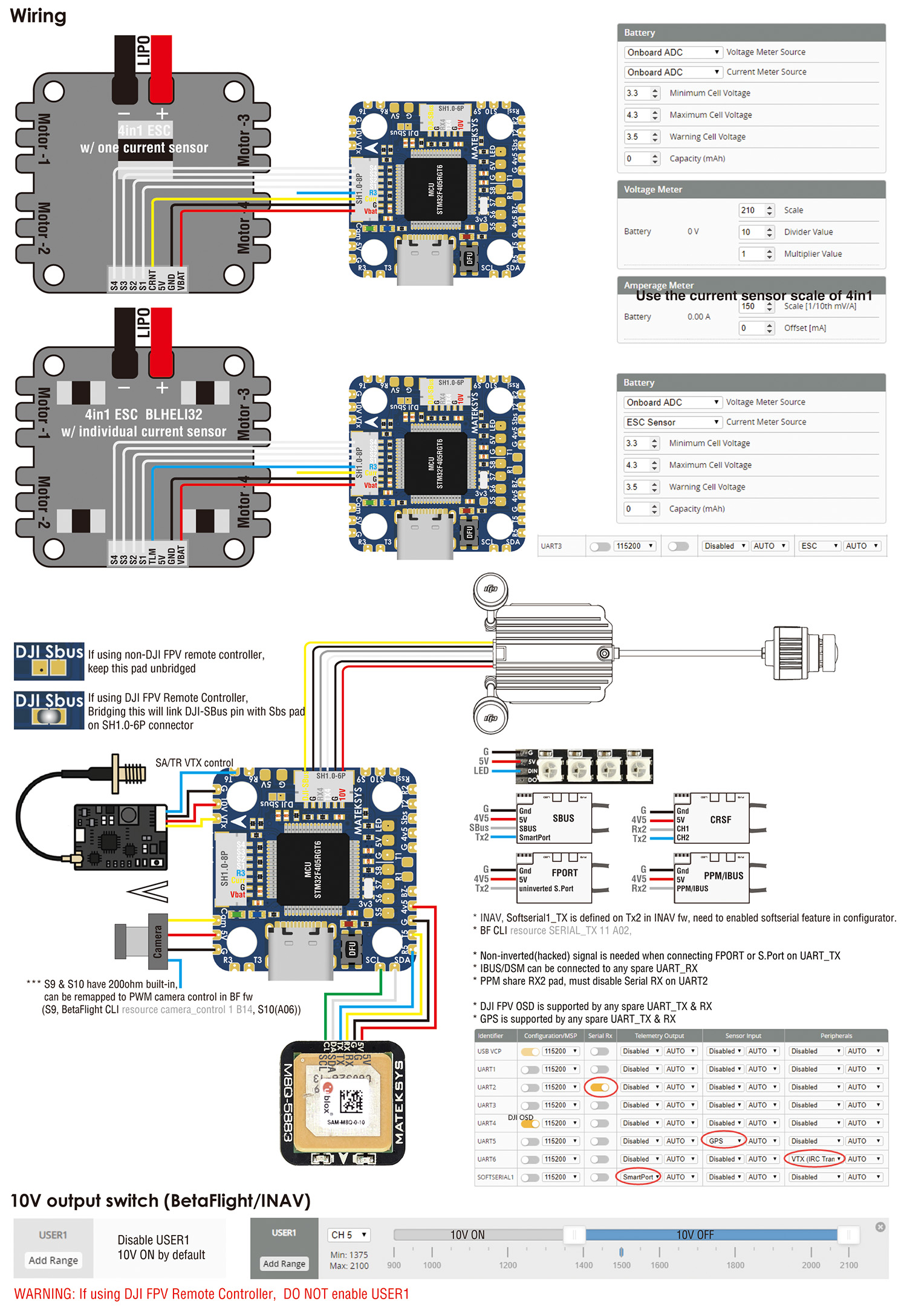
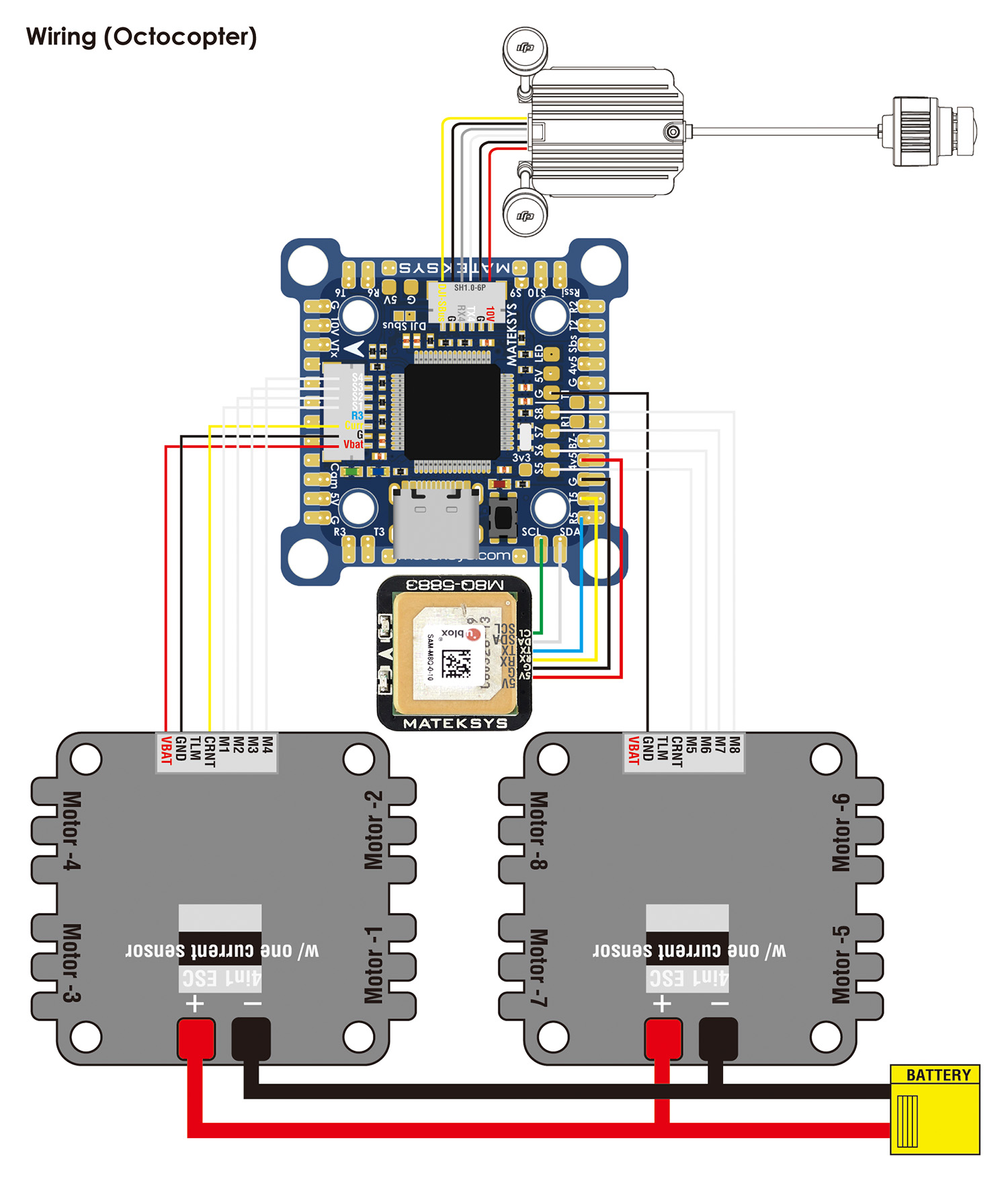
Wiring
INAV/BF mapping
ArduPilot mapping
Notes & Tips
Share
Prices for Matek F405-miniTE in stores
Deals found: 55 (AliExpress2, ReadyMadeRC1)
| Store | Stock level | Lot price | Shipping cost | Coupon / promocode | Pcs./lot | 1pc price |
| ReadyMadeRC | Out of stock | $52 | 1 | $52 | ||
| AliExpress | High stock level | $53 | + $9.52 | 1 | $63 | |
| AliExpress | High stock level | $74 | + $3.59 | 1 | $77 |
See also

Join to our channels: new products, coupons, best deals: